Compare
PM01 vs Reachy 2
| Spec |  PM01  EngineAI EngineAI | 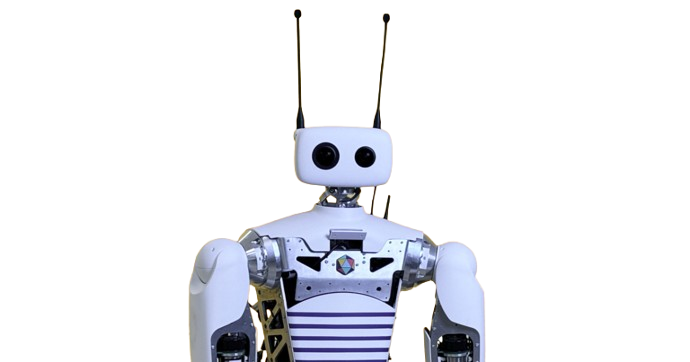 Reachy 2  Pollen Robotics Pollen Robotics |
|---|---|---|
| Readiness Score | 87 | 86 |
| Reality Score | 78 | 84 |
| Data Freshness | 100% | 100% |
| Price | $12,000 | $70,000+ |
| Market Status | Buy Now | Limited |
| Availability | Limited | Limited |
| Form | Humanoid | Humanoid |
| Height | 138 cm | 136–166 cm |
| Weight | 40 kg | 32–50 kg |
| Battery | 2 h | 8–10 h |
| Speed | >2 m/s | Unknown |
| Payload | Unknown | 3 kg per arm |
| Sensors | Intel RealSense depth camera, stereo cameras, LiDAR (education), IMU | 2× IMX296 global-shutter stereo cameras, Orbbec Gemini 336 RGB-D, Luxonis OAK ToF, RPLIDAR S2, 2× lavalier mics, wheel IMUs |
| Connectivity | Wi-Fi, Ethernet | Ethernet, Wi-Fi (customer network for AI) |
| Countries | China | United States, France, Global (direct order) |
| Social Interaction | 52 | 70 |
| Home Navigation | 68 | 58 |
| Ecosystem | ROS / ONNX deployment; MuJoCo sim2sim; Isaac-based training code; Jetson Orin NX dev stack (education); Quick-swap battery pack | ROS 2 Humble; Python SDK; Hugging Face LeRobot; Pollen-Vision perception library; VR teleoperation (Meta Quest 2/3); Docker simulation stack (Gazebo, MuJoCo) |
Green cells mark the stronger value in each row across 2 robots.